» Veranstaltungen

» Navigation
» über uns
|
» Registrierung
Liebe Mitleserinnen, Mitleser, Foristinnen und Foristen,
wer sich von Euch in letzter Zeit mit dem Gedanken getragen hat, Mitglied unseres wunderbaren IGDH-Forums zu werden und die vorher an dieser Stelle beschriebene Prozedur dafür auf sich genommen hat, musste oftmals enttäuscht feststellen, dass von unserer Seite keine angemessene Reaktion erfolgte.
Dafür entschuldige ich mich im Namen des Vereins!
Es gibt massive technische Probleme mit der veralteten und mittlerweile sehr wackeligen Foren-Software und die Freischaltung neuer User ist deshalb momentan nicht mit angemessenem administrativem Aufwand möglich.
Wir arbeiten mit Hochdruck daran, das Forum neu aufzusetzen und es sieht alles sehr vielversprechend aus.
Sobald es dies bezüglich Neuigkeiten, respektive einen Zeitplan gibt, lasse ich es Euch hier wissen.
Das wird auch für alle hier schon registrierten User wichtig sein, weil wir dann mit Euch den Umzug auf das neue Forum abstimmen werden.
Wir freuen uns sehr, wenn sich die geneigten Mitleserinnen und Mitleser, die sich bisher vergeblich um eine Freischaltung bemüht haben, nach der Neuaufsetzung abermals ein Herz fassen wollen und wir sie dann im neuen Forum willkommen heißen können.
Herzliche Grüße von Eurem ersten Vorsitzenden der IGDH
Rainer Feile
-
 Phasen-Information bei der LS-Entwicklung Phasen-Information bei der LS-Entwicklung
Hallo,
vor einiger Zeit hatte Wolfgang den Thread "Bewertung der Messergebnisse Phase und Gruppenlaufzeit" eröffnet um über die gemessenen Phaseninformationen und deren Bewertung zu diskutieren. Im Thread ging es dann über weite Strecken darum wie die Phase "richtig" gemessen wird - insbesondere bei Verwendung von Clio oder Arta.
Darauf möchte ich hier nicht mehr eingehen. Sondern basierend auf realen Messungen die Bedeutung der Phasen-Informationen für die Entwicklung und Auswertung mir euch diskutieren.
Hoffe auf euren Einspruch wenn ich intellektuellen Dünn...pfiff als Fakten anrichten sollte.
Vorab sollten die Begriffe Phase, Minimalphase und Excessphase (würde hier gerne das Englische Wort beibehalten, da damit wohl "Überschuss" gemeint ist und dies nichts mit dem Exzess im Deutschen zu tun hat) definiert werden.
Phase wäre dann in diesem Fall die "laufzeitbereinigte" (die Flugzeit vom ersten Impuls zum Mikrofon wird "herausgeschnitten") Gesamtphase oder Normalphase des gesamten Systems.
In der Arta-Docu wäre dann weiter definiert:
Quelle: http://www.artalabs.hr/support.htm
A simple definition of minimum phase is: A system phase characteristics for which the equivalent system with the same magnitude characteristics and a minimum phase changes can be realized (over all frequencies). The difference between the phase and the minimum phase characteristics is usually called excess phase.
Mathematically, the minimum phase can be estimated from the magnitude of the frequency response using the Hilbert transform.
Minimalphase der Anteil der Phase, der sich via Hilbert-Transformation aus dem Frequenzgang ergibt.
Die Excessphase stellt die Differenz von Phase und Minimalphase dar. In der Excessphase können sich z.B. die Allpässe eines Lautsprechers, "Fehler" der Laufzeitbereinigung oder/und Filter des Audio-Interface (z.B. ein Lowpass-Filter bei 30kHz) "verstecken" - später mehr dazu.
Noch kurz zu den Schwierigkeiten die Minimalphase "korrekt" zu bestimmen. Dazu hat sich Ivo Mateljan (Autor von Arta) im Arta-Thread auf diyaudio.com geäußert:
Quelle: https://www.diyaudio.com/forums/mult...7-arta-64.html
Minimum phase is characteristic of linear systems that can be calculated from the magnitude of frequency response but only for systems in which there are no wave reflection (such systems can be described by finite number of poles and zeros in plane of complex frequency). This mathematical definition practically means that responses of loudspeakers and microphones does not follow minimum phase in frequency range where dimension of object are larger than quarter of wavelength.
...
I have published paper before 30 years where I analyzed various method for minimum phase estimation. The numerical method that can be used for correct minimum phase calculation from magnitude response requires knowledge of response in frequency range from zero to infinity frequency. As we measure in restricted range we must assume response below and above that range, and that assumption is always a problem.
Nun aber zu ein paar konkreten Beispielen.
In den Beispielen werden die verschiedenen "Phasen-Begriffe" anhand eines Lautsprechers betrachtet. Die Mikrofonposition war bei allen Messungen gleich und wurden auf halber Höhe zwischen HT und MT durchgeführt.
Betrachtet werden
der HT unbeschaltet (FG-Messung gelbe Kurve)
der HT beschaltet mit LR 4.Ordnung bei 1.8kHz (FG-Messung hellgelbe Kurve)
der gesamte 3-Wege-Lautsprecher (FG-Messung rote Kurve)
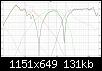
Die zugehörigen FG-Messungen sehen wie folgt aus:

Das Hochpass-Filter für den HT trifft das Target-Filter (rote Kurve) fast perfekt.
Betrachten wir nun die zugehörigen Phasen-FG.
Soweit nicht anderes aufgeführt gilt für die dargestellten Phasen-Messungen immer:
- Phase, gelbe Kurve
- Minimalphase, orange Kurve
- Excessphase, lila Kurve
1. Hochtöner unbeschaltet:

Eigentlich würde man erwarten, dass sich ein einzelnes Chassis über weite Strecken minimal-phasig verhält und somit die Minimalphase auf der Phase zu liegen kommt (oder zumindest über weite Strecken parallel verläuft) und die Excessphase Null/Konstant ist.
Die Ursache für die Abweichung kann in der oben beschriebenen "Unschärfe" in der Berechnung der Minimalphase liegen und im Super-Hochton schon durch den Lowpass-Filter des Audio-Interface beeinflusst sein - wer dazu mehr weiß, her mit der info 
2. Hochtöner beschaltet:

Die Phase trifft das Phasenverhalten des Target-Filter (24dBLR@1800Hz, rote Kurve) fast perfekt. Die aus dem FG bestimmte Minimalphase zeigt schon deutliche Abweichungen.
Die Minimalphase scheint parallel verschoben zu sein - warum das so ist, ist mir nicht ganz klar.
3. Gesamt-Lautsprecher:

Hier bringt die orange Kurve der Minimalphase nun überhaupt keine zusätzlichen Informationen mehr (da aus dem FG bestimmt) und die dem Lautsprecher zugrunde liegende Filterung nun komplett in der Excessphase "versteckt" ist.
Erst die Betrachtung der Phase zeigt, dass die Filterung 4.Ordnung mit einer Phasendrehung von 360° um die Trennfrequenz von 1800Hz nahezu perfekt gelungen ist.
Die relativ starke Abweichung des Phasen-FG vom idealen Phasenverhalten (rote Kurve) unterhalb von 1.6kHz hängt mit der nicht ganz optimal verlaufenden Filterflanke des HT und der gegenseitigen Beeinflussung der Trennungen des 3-Wege LS zusammen.
Einsatz der Minmalphase in der LS-Entwicklung?
Bei meinen Messungen war die Minimalphase immer ungenauer als die Phase.
Weiter enthält die Phase in der Excessphase die SEO-Differenz der Chassis. Diese ist in der Minimalphase natürlich nicht enthalten und muss gesondert bestimmt werden und im Simulationsprogramm berücksichtigt werden.
Siehe dazu z.B. "Die akustische Phase, das unbekannte Wesen" auf hifi-Selbstbau.de
Beim Einsatz von DSP kann praktisch ganz auf die Bestimmung der Phase verzichtet werden, solange die Filterflanken den Zielfunktionen möglichst genau entsprechen. Da eine Korrektur der SEO-Differenz durch das Setzen eines Delay vorgenommen werden und in den meisten Fällen dieses iterativ bestimmt werden kann.
Gruß Armin
-
Minimalphase mit einfacher SEO-Korrektur für die LS-Entwicklung geeignet?
Hallo,
das wird wohl eher nicht der populärste Thread werden
Nichtsdestotrotz geht es weiter, wollte für mich die Sache abklären und ihr werdet zur Teilhabe gezwungen...
Es gibt Mess-Systeme welche die Phaseninformationen nicht mit verarbeiten und nur die Minimalphase aus dem FG berechnen.
Andere wollen sich das setzen eines Pre-Delay sparen und nutzen die Minimalphase aus Bequemlichkeit.
Die fehlende Information, die Differenz der Schallentstehungsorte (SEO) der Chassis untereinander (welche in der "vollständigen" Phase enthalten ist), wird oft über den einfachsten Weg via Vergleich der Maxima der Impulsantworten gewonnen und dann als SEO oder Delay ins Simulationsprogramm eingetragen.
Oder wird angenommen, dass bei übereinstimmenden Impulsantwortmaxima (z.B bei 2-Wege Projekten) die SEO identisch sind und die Minimalphase für die Entwicklung ausreichend ist.
Dies soll es in diesem Post näher betrachtet werden.
Theoretisch sollte diese stark vereinfachte Betrachtung heftig schief gehen, da gilt:
Quelle: ARTA-Handbuch
Nach Anregung durch ein Signal lenkt die Lautsprechermembran, getrieben durch die Schwingspule, aus und produziert Luftschall.
Diese Auslenkung ist nicht bei allen Frequenzen für alle Membranabschnitte gleich (kolbenförmige Abstrahlung), sondern es kommt zu Verformungen und Resonanzen in der Membran. Diese Vorgänge erfordern eine gewisse Zeit, bis sie sich vom Ort der Krafteinleitung, der Schwingspule, zu den einzelnen Membranabschnitten fortgepflanzt haben und dann dort als Schall abgestrahlt werden.
Die Laufzeit hängt sowohl von den Abmessungen der Membran als auch von den Eigenschaften der verwendeten Membranmaterialien ab.
Es ist leicht vorzustellen, dass dieser Vorgang frequenz- und ortsabhängig sein wird. Ferner lässt sich einfach zeigen, dass abweichend vom Modell der Punktschallquelle, bei einem realen Lautsprecher und
endlichem Messabstand nicht alle Membranabschnitte gleich weit vom Mikrofon entfernt sind.
Also liefert die Differenz der Maxima der Impulsantworten eher einen "zufälligen" relativen SEO - zumindest beim Einsatz von Konus-Chassis. Bei Elektrostaten, Bändchen,... sollte das Problem des frequenzabhängigen SEO eher nicht (oder sehr schwach ausgeprägt) auftreten.
Wie groß ist der Fehler in der Realität?
Dies soll am Beispiel eines 3-Wege-LS mit 0.75'' HT, 6'' MT und 2 x 8'' TT gezeigt werden. Der HT spielt im Waveguide und die SEO von HT und MT wurden bewusst baulich angeglichen.
Die Messungen erfolgten alle mit einer festen Mic-Position zwischen HT und MT in 180cm Abstand.
a) Als erstes der relative SEO zwischen HT und 6'' MT durch den Vergleich der Impulsmaxima:
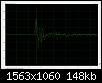
Die Maxima sind exakt deckungsgleich, zeigen damit einen Versatz von 0mm von HT (gelbe Kurve) und MT (grüne Kurve).
Die Messung erfolgte mit 96kHz Abtastrate, der Fehler durch die Abtastrate beträgt ganz grob 0.01ms oder 0.36cm.
aa) relativer SEO zwischen HT und MT durch Vergleich des excess-group-delay um 2kHz:
In der deutschen Arta-Dokumentation sind mehrere Wege beschrieben den SEO aus einer "vollständigen" Messung zu bestimmen - siehe Seiten 103ff.
Hier soll durch Anwendung der Excess-Group-Delay-Funktion der relative SEO zwischen den Chassis bestimmt werden. Durch das Verschieben der Graphen entlang der Zeitachse, bis diese im gewünschten Bereich der Trennfrequenz aufeinander fallen, wird der SEO bestimmt.
Der gelbe Graph stammt vom HT, grün ist der Konus-MT. Bei dieser Methode muss der MT um 0.015ms verzögert werden um im Bereich 1.5-3.0kHz mit dem HT Übereinstimmung zu erreichen. Das ist etwas mehr als im schlimmsten Fall die Unschärfe durch die Abtastrate verursachen könnte und durch die Angleichung der Graphen wird der Fehler eher deutlich darunter liegen.
Dies entspricht einem Versatz der SEO von 0.51cm ohne Fehlerkorrektur der Abtastrate. Das ist selbst bei Berücksichtigung der Auflösung durch die Abtastrate eine kleine Abweichung von der SEO-Bestimmung durch die Differenz der Impulsmaxima.
Die Abweichung bei der Bestimmung des relativen SEO (der beiden Methoden) beträgt demnach 0.015ms. Unter Annahme, dass die Bestimmung des relativen SEO unter Verwendung des Excess-Group-Delay mehr der Realität entspricht, ergibt sich (ohne Einbezug des Fehlers durch die Abtastrate) bei einer Trennfrequenz um 3kHz / 1.5kHz ein Phasenfehler von rund 16° / 8°. Berechnet mit Phasenfehler = (0.015ms/1000) / (1/3000Hz) * 360°.
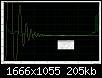
b) Der relative SEO zwischen HT und 8'' TT durch den Vergleich der Impulsmaxima:

Hier gibt es endlich wirklich was zu messen. Der relative SEO der beiden TT zum HT beträgt 2.87cm oder 0.083ms und setzt sich zusammen aus dem Tiefenversatz und der vertikalen Anordnung der Chassis.
bb) relativer SEO zwischen HT und beiden TT durch Vergleich des excess-group-delay bei 2kHz:
Nun wird es interessant und ein wenig unübersichtlich.
Der 0.75'' HT liefert im Bereich unter 1kHz keine verlässlichen Daten mehr. Daher wurde der relative SEO nach dieser Methode für den Bereich um 2kHz bestimmt und beträgt 0.035ms.
Bei einer Trennung um 2kHz, was einem typischen 2-Weger mit 1'' HT und 8'' TT entsprechen würde, liegen beide SEO-Methoden erheblich auseinander. Die Differenz beträgt 0.048ms, was bei 2kHz einer Phasendifferenz von 35° entspricht.
Das ist schon erheblich und zeigt, dass der relative SEO von Chassis über die Bestimmung des Zeitversatzes der Implusmaxima nicht hinreichend genau bestimmt werden kann (vorausgesetzt die Bestimmung über die Angleichung der excess-group-delay Graphen ist realistischer - was sehr wahrscheinlich der Fall ist).
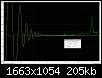
c) Der relative SEO zwischen 6'' MT und 8'' TT durch den Vergleich der Impulsmaxima:

Keine Überraschung, mit 2.87cm oder 0.083ms exakt der erwartete Wert, da der SEO HT-MT 0ms war. Soweit also konsistente Werte.
cc) relativer SEO zwischen MT und beiden TT durch Vergleich des excess-group-delay bei 450Hz:

Der TT muss bei 450Hz also um 0.01ms verzögert werden um eine Graphendeckung in diesem Bereich zu erzielen. Damit ergibt sich ein Unterschied von 0.093ms zwischen den beiden Methoden, was bei 450Hz einer Phasendifferenz von 15° entspricht.
Auch in diesem Fall ist der Fehler schon relativ groß, obwohl mit 8'' und 6'' Konus-Chassis die Abmessungen nicht so unterschiedlich waren.
Richtig dramatisch könnte der Fehler werden wenn 12'' oder 15'' TT zu einem Horn bei 1kHz getrennt werden. Da ich zur Zeit an einem Projekt mit 15'' Subwoofer arbeite, wird dazu vielleicht noch etwas kommen.
Wer passive Weichen entwickelt sollte die oben beschriebene Art der Ermittlung des relativen SEO über die Impulsmaxima nach Möglichkeit nicht verwenden - siehe Update und Post#7, Aussage gilt für das Beispiel nicht.
Bei aktiven Projekten lassen sich die Fehler durch ändern des Delay relativ einfach beheben.
Im in Post#1 verlinkten Artikel von Hifi-Selbstbau ist eine aufwendige Methode zur Bestimmung des relativen SEO aus FG-Messungen beschrieben, die zu "realistischen" Ergebnissen führen sollte und die Frequenzabhängigkeit des relativen SEO berücksichtigt.
UPDATE: In Post#7 zeigt sich, dass die Simulation der verschiedenen Methoden lange nicht so drastisch ist wie hier vermutet!
Gruß Armin
Geändert von ctrl (10.12.2018 um 01:03 Uhr)
-
Chef Benutzer

Hallo Armin,
das wird wohl eher nicht der populärste Thread werden
Nichtsdestotrotz geht es weiter, wollte für mich die Sache abklären und ihr werdet zur Teilhabe gezwungen...
Mach' mal - ich lese mit großem Interesse mit.
Gruß,
Christoph
-
-
Hallo,
habe mir über die Phaseninformation eigentlich auch nie groß Gedanken gemacht. Da ich schon immer Arta einsetze und dort der Phasenfrequenzgang bei korrekter Vermessung im Simulationsprogramm und später bei der Messung des LS immer wie aus dem Lehrbuch gepasst hat, hat die Betrachtung des Phasenfrequenzgang meist nur ein Achselzucken ausgelöst.
Ignorant wie ich nun mal bin, wurde auch nie ein anderes Messprogramm versucht.
Ehrlich gesagt weiß ich nicht wie viele Hobby-Entwickler über die in Post#2 aufgezeigt Methode den relativen SEO der Chassis bestimmen um ihn dann ins Simulationsprogramm zu übertragen, vermute wenige.
Vielmehr sollte mir Post#2 selbst klar machen, dass der SEO eines Chassis meist kein fester Wert ist, sondern sich bei Konus-Chassis frequenzabhängig ändert. Das Beispiel liefert einen Anhaltspunkt dafür bei welcher Größenordnung die Varianz liegt und welche Auswirkung dies auf den Phasenfrequenzgang hat.
Die Phase hat mich bei meinen aktiven Projekten nie interessiert.
Aktiv ist man auch fein raus
Denke aber auch bei einem aktiv Projekt kann die "richtige" Phaseninformation im Simulationsprogramm (wie VituixCAD) die Entwicklung sicher beschleunigen.
Insbesondere wenn z.B. ein Butterworth-Filter 3.Ordnung genutzt wird. Im Idealfall sollte sich der FG beim verpolen eines Chassis nicht ändern. Dies durch try&error über Messungen und Nachjustieren im Filterdesigner zu realisieren stelle ich mir ziemlich übel vor.
Gruß Armin
-
 Zitat von ctrl

......
Vielmehr sollte mir Post#2 selbst klar machen, dass der SEO eines Chassis meist kein fester Wert ist, sondern sich bei Konus-Chassis frequenzabhängig ändert. Das Beispiel liefert einen Anhaltspunkt dafür bei welcher Größenordnung die Varianz liegt und welche Auswirkung dies auf den Phasenfrequenzgang hat.......
Letztendlich kommt es doch nur bei der Übernahmefrequenz zum nächsten Chassis darauf an, oder?
Zitat von ctrl
......
Aktiv ist man auch fein raus
Denke aber auch bei einem aktiv Projekt kann die "richtige" Phaseninformation im Simulationsprogramm (wie VituixCAD) die Entwicklung sicher beschleunigen.
Insbesondere wenn z.B. ein Butterworth-Filter 3.Ordnung genutzt wird. Im Idealfall sollte sich der FG beim verpolen eines Chassis nicht ändern. Dies durch try&error über Messungen und Nachjustieren im Filterdesigner zu realisieren stelle ich mir ziemlich übel vor.
Gruß Armin
Da ich konservativ auf LR4-Filter bei vorher über die Trennfrequenz hinaus linearisierte Chassis setze, kann ich durch Verpolen ziemlich genau den SEO-Versatz ausgleichen. Warum soll ich es mir schwer machen, wenn es auch einfach geht
-
Hallo,
so es geht weiter...
Jetzt wollte ich doch noch sehen wie groß der Fehler wirklich ist, wenn alles in ein Simulationsprogramm eingepflegt wird.
Dazu habe ich
- einmal die vollständigen Arta-Messungen (FG + Phase) in VituixCAD eingepflegt
- dann die FG ohne Phaseninformation exportiert und in VituixCAD die Minimalphase hinzugefügt, importiert und für den TT ein Delay von 0.083ms eingetragen - Bestimmung des SEO über Impulsantwort Maxima Differenz - siehe Post#2
- bzw. bei Bestimmung des SEO über excess group delay Methode, für den MT ein Delay von -0.015ms und im TT ein Delay von -0.01 + -0.015 = -0.016ms gesetzt - siehe Post#2
Dann wurde für alle Simulationen die exakt gleiche Weiche simuliert.
Erst die Simulation mit vollständiger Phaseninformation, dann die Simulation mit Minimumphase und Delay (über Impulsmaxima Differenz) und als letztes die Simulation mit Minimumphase und dem Delay über das excess group delay aus der vollständigen Messung:
FG mit Phase
  
FG mit MT verpolt
Da hat die Realität voll zugeschlagen und gezeigt, dass nichts so heiß gegessen, wie gekocht wird!
Denke die minimalen Abweichungen können schlicht ignoriert werden.
Die weniger gute Phasenlage im Tiefton bei Verwendung der excess group delay Differenz hängt wohl mit einer "schlechten" Auswertung meinerseits zusammen. Da im Zielbereich bei 450 Hz die Graphen nicht richtig deckungsgleich waren, habe ich sie einfach kreuzen lassen, was wohl eher schlecht war - siehe Post#2 Abschnitt cc)
Damit muss ich meine Aussage aus Post#2 widerrufen (ist ja immerhin schon ein paar Stunden alt) und erklären, dass die SEO Bestimmung über die Impulsantwort Maxima doch sehr brauchbare Ergebnisse liefert - zumindest in diesem Fall.
Es ist immer cool Stunden in eine Sache zu investieren, um sich dann öffentlich zu widersprechen
Jetzt fehlt nur noch der Vergleich mit der realen Messung des LS. Da die verwendete Weichenversion noch nicht vermessen wurde, werde ich dies in ein paar Tagen nachholen.
Gruß Armin
-
Hallo Armin,
als "neuer" habe ich mal eine "fragende Antwort". Deine Untersuchungen erinnern mich an meine Simulationen in BoxSim, wo ich der Frage nachgegangen bin, in wie weit ein Phasenversatz im Übernahmebereich zweier Treiber vertretbar ist (siehe hier http://www.visaton.de/vb/showpost.ph...&postcount=478).
Überraschend war für mich, dass ein Phasenversatz von 25° auf der Hauptachse keinen großen Einfluss hat. Bleibt noch aus, in wieweit das für die Raumwinkel gilt.
Entspricht das in etwa deinen Gedanken?
Grüße
Sven
-
Hallo Sven,
...wo ich der Frage nachgegangen bin, in wie weit ein Phasenversatz im Übernahmebereich zweier Treiber vertretbar ist.
Entspricht das in etwa deinen Gedanken?
Auf die Bewertung der Auswirkung von Phasenfehler bin ich bisher nicht eingegangen.
Es wurden zwei mögliche Vorgehensweisen bei Entwicklung/Simulation von Lautsprecher gegenüber gestellt:
- Einmal die Messung des "vollständigen" FG (enthält den Phasenfrequenzgang, welcher in die Minimalphase und Excessphase aufgeteilt werden kann) und dessen Einsatz bei der Entwicklung (via Simulationsprogramm) - der relative SEO der Chassis zueinander muss hierbei nicht bestimmt werden, da in der Excessphase mit enthalten.
- Im Gegensatz zur Messung des reinen FG ohne jegliche Phaseninformation, der Berechnung der Minimalphase aus dem FG und der Berücksichtigung der relativen SEO der Chassis zueinander.
Der relative SEO wird hierbei möglichst einfach aus der Differenz der Impulsmaxima bestimmt - es gibt aber noch andere Verfahren.
Mit dem Maßband ausmessen und/oder den relativen SEO berechnen wird der eine oder andere vielleicht auch noch.
Da der SEO frequenzabhängig ist sollten bei der zweiten Methode Phasenfehler auftreten, sofern der SEO nicht frequenzabhängig bestimmt wird, wie z.B. bei der Differenz der Impulsmaxima.
In Post#1 wurden dann an einem konkreten Beispiel die Phase, Minimalphase und Excessphase für einen HT in unbeschaltetem Zustand, mit Filter und im Gesamt-LS verglichen.
In Post#2 wurden dann versucht einen Anhaltspunkt für den möglichen Phasenfehler zu erhalten, wenn man die Frequenzabhängigkeit des SEO ignoriert und nur einen festen Wert bestimmt - hier über die Differenz der Impulsmaxima der Chassis.
Der Phasenfehler lag bei einem 0.75'' HT und 6'' TMT theoretisch unter 15°, bei Trennung bis 3kHz.
Bei der Betrachtung von MT-TT ist mir ein kleiner Fehler bei der Auswertung über die Excessphase unterlaufen. Komme auf den Sachverhalt aber noch mal zurück, wenn mein 15'' TT-Gehäuse fertig ist und dann der mögliche Fehler für eine Kombination mit einem Horn bestimmt werden kann.
In Post#7 ging es dann um die Auswirkung der unterschiedlich bestimmten Phasenfrequenzgänge im Simulationsprogramm, an einem realen Beispiel. Da hat sich sich dann gezeigt, dass die Bestimmung der SEO über die Differenz der Impulsmaxima (und damit die Frequenzabhängigkeit des SEO ignoriert wird) in Kombination mit der Minimalphase, beim verwendeten Beispiel, hinreichend genau ist - zumindest wenn keine exotischen Trennfrequenzen gewählt werden.
Also viel bla-bla für eine sehr spezielle Fragestellung.
Gruß Armin
Geändert von ctrl (16.12.2018 um 21:10 Uhr)
-
Hallo Armin,
vielen Dank für die Zusammenfassung deiner Beiträge. Das sortiert das ganze wirklich gut!
Zitat von ctrl
In Post#3 ging es dann um die Auswirkung der unterschiedlich bestimmten Phasenfrequenzgänge im Simulationsprogramm, an einem realen Beispiel. Da hat sich sich dann gezeigt, dass die Bestimmung der SEO über die Differenz der Impulsmaxima (und damit die Frequenzabhängigkeit des SEO ignoriert wird) in Kombination mit der Minimalphase, beim verwendeten Beispiel, hinreichend genau ist - zumindest wenn keine exotischen Trennfrequenzen gewählt werden.
Ich denke das ist das, was auch meine Betrachtung zeigt. Geht man davon aus, dass der Fehler bei der Bestimmung der Phase kleiner 25° ist, hat das kaum eine eine Auswirkung.
Aber vielleicht verstehe ich auch dein Anliegen nicht.
Grüße
Sven
-
Hallo,
Ich denke das ist das, was auch meine Betrachtung zeigt. Geht man davon aus, dass der Fehler bei der Bestimmung der Phase kleiner 25° ist, hat das kaum eine eine Auswirkung.
Aber vielleicht verstehe ich auch dein Anliegen nicht.
Okay, jetzt verstehe ich deine Frage richtig - der Schwabe ist von Natur aus etwas langsamer, als der Rest der Menschheit
Auch wenn ich in Richtung Auswirkung von Phasenfehlern nicht gedacht/argumentiert habe, sondern diese nur aufzeigen wollte, zeigt Post#7 dass die im Beispiel auftretenden Phasenfehler sich laut Simulationsprogramm auf Achse kaum auswirken.
Da der HT-TMT bei 1.8kHz getrennt wird, gehe ich von einem Phasenfehler unter 10° aus, durch Verwendung der Minimalphase plus einfache Bestimmung des relativen SEO gegenüber der "vollständigen FG-Messung mit kompletter Phase". Wie stark sich dies auf das vertikale Lobbing auswirkt, kann ich nicht sagen - das wollte ich auch schon lange mal realistisch untersuchen....
Gruß Armin
Forumregeln
- Es ist dir nicht erlaubt, neue Themen zu verfassen.
- Es ist dir nicht erlaubt, auf Beiträge zu antworten.
- Es ist dir nicht erlaubt, Anhänge hochzuladen.
- Es ist dir nicht erlaubt, deine Beiträge zu bearbeiten.
-
Foren-Regeln
|





 Mit Zitat antworten
Mit Zitat antworten